Project Summary
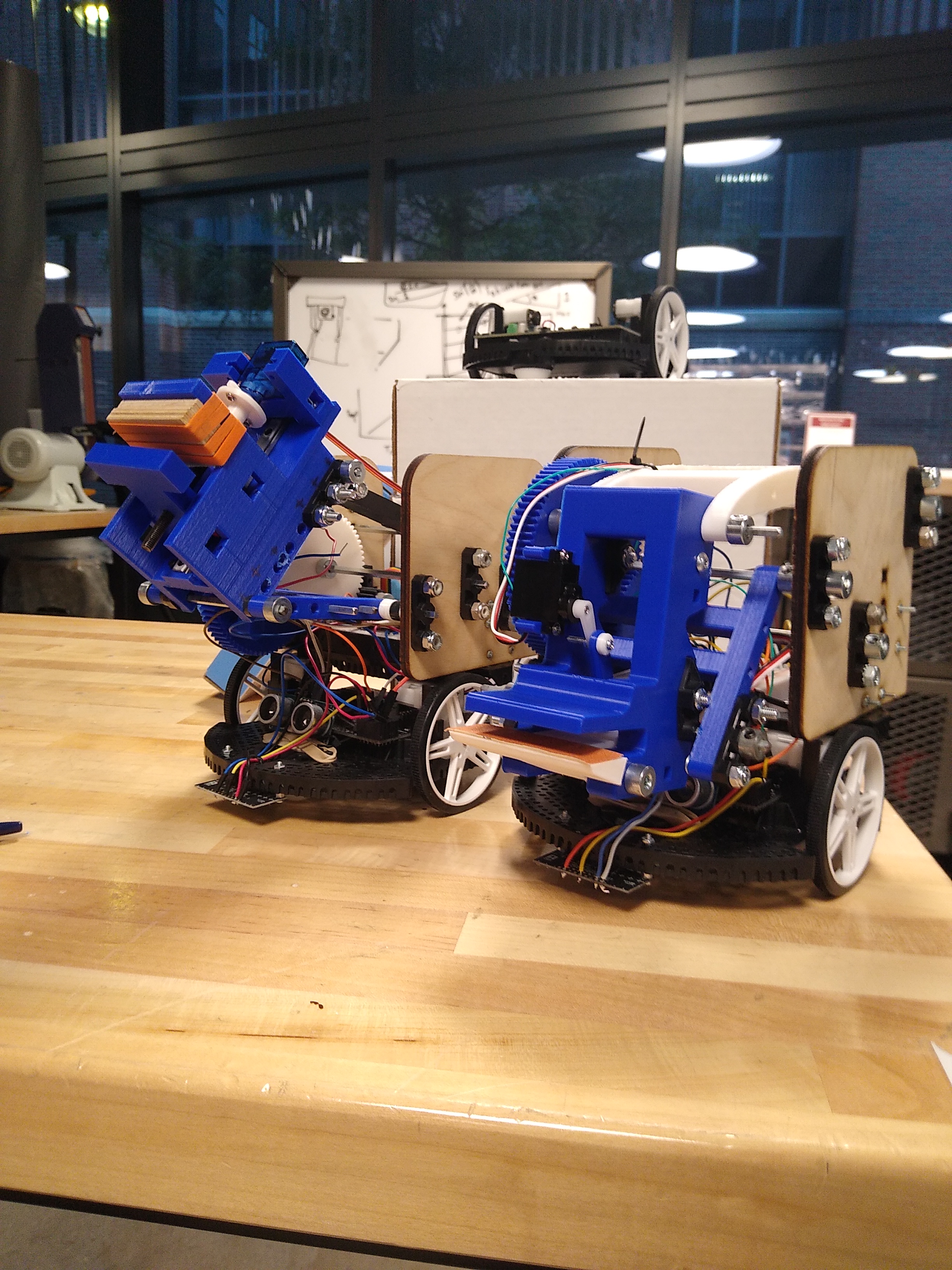
The objective of the robot is to pick up and put down panels on top of slants at varying angles. The special challenge of the course is that the robot should complete these tasks while only using one motor for it’s lifting mechanism. In order to overcome this challenge, teams are expected to use a “fourbar mechanism” that allows the grabbing mechanism to change it’s orientation as it’s lifted.
I worked in a group of 4, with a focus in the 3D modelling and design of the robot.
Environment
The robots played on a tabletop field with various plates and towers. The field also has walls, and a black lines on the floor. We used ultrasonic, IR, and light sensors to ensure the Romi robots could properly navigate the field.
3D Model
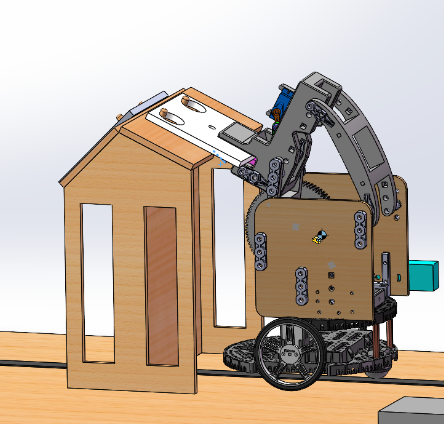
In order to ensure we could reach 3 points to grab metal plates hanging at specific angles, we created a 3D model in solidworks to properly simulate the motion of the robot. The arms bottom and top arms of the robot are different lengths in order to rotate the angle of the acquisition device. We 3D printed and lasercut these models in order to assemble the robots.
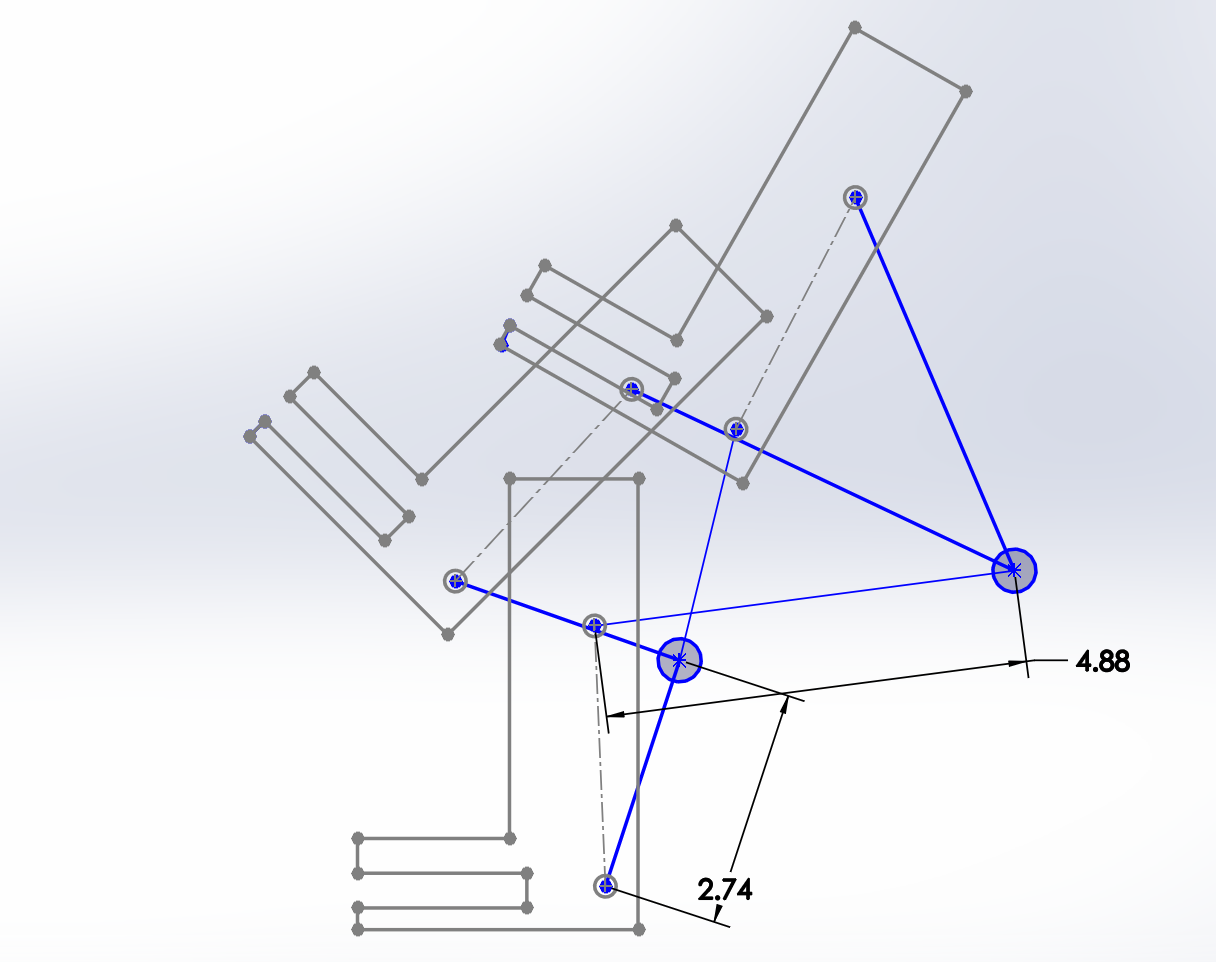
Motion Planning
I created a solidworks sketch in order to properly plan the motion of the grabber to meet the requirements of the challenge. Using math and geometry, we could plan the motion of the grabber to reach all desired points using a fourbar mechanism.