Summary
I'm a student at Worcester Polytechnic Insitute completing a MS in Robotics Engineering
Experience:
- Controls Engineer- DEKA
- Robotics Engineering Intern- Tyson Build Plates
- Software Engineering Intern- Neurala
- Prototyping Lab Assistant- WPI
- Math Tutor- Mathnasium
Projects:
- Autonomous Driving Scene Reconstruction- Computer Vision
- Automated Chess Board- Capstone Project
- Quadruped Robot Stair Climbing- Major Qualifying Project
- Pick and Place Robot Arm- Robot Manipulation
- SLAM Robot- Robot SLAM and Navigation
- Swarm Pathfinding Algorithms- Artificial Intelligence
- Administration Software- Software Engineering
- Robot Swarm Maze Solver- Robotic Sensing
- Robot Fourbar Mechanism- Robot Motion
- Grip Assist Glove- Research Project
- Water Biofiltration- Interactive Qualifying Project
- Guitarduino- Musical Robotics
- Video Game Mod- Independent Project
Education:
- Worcester Polytechnic Institute- MS Robotics Engineering >li>Worcester Polytechnic Institute- BS Robotics Engineering
- Belmont High School
Portfolio

Autonomous Driving Scene Reconstruction- Computer Vision
Created computer vision pipeline that takes in dashcam footage, identifies objects, and reconstructs the scene in a blender display.
View Project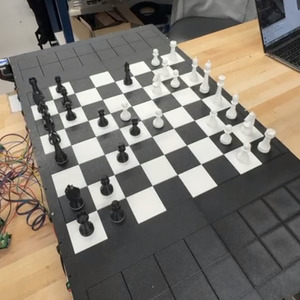
Capstone Project: Automated Chess Board
Created robotics chess board that automatically responds to your moves by moving pieces magnetically. Developed custom AI chess engines that can be tuned on any players Chess.com data to replicate their play style.
View Project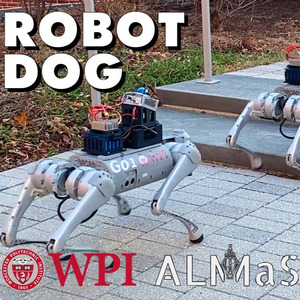
Major Qualifying Project: Quadruped Stair Climbing
Implemented autonomous stair climbing capabilities on the quadruped Unitree Go1 robot. Installed Livox Mid 360 onto the robot to increase sensing capabilities, adjusted URDF accordingly. Integrated FAST-LIO SLAM into C++ Kalman filter state estimation of OCS2 based NMPC-WBC framework. Updated robot centric elevation mapping based ROS package to use improved odometry to reduce drift.
View Project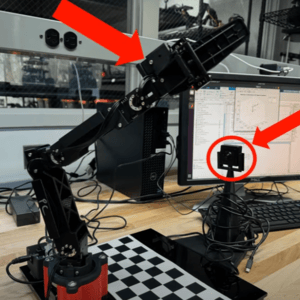
Unified Robotics III: Pick and Place Robotic Arm
I programmed a 4 degree of freedom robotic arm to pick up and sorts balls by color. A camera recognizes balls and other objects with an Image Processing Pipeline created in Matlab. The arm is controlled with forward and inverse kinematics as well as polynomial trajectory planning.
View Project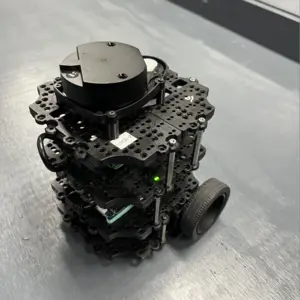
Unified Robotics IV: SLAM Robot
I programmed a robot that will simultaneously localize itself, and map it's enviroment. It uses A* to navigate around available space. ROS is used to run the program on either the robot, or a simulation in gazebo, both of which are visualized in Rviz.
View Project.png)
Artificial Intelligence: Swarm Pathfinding Algorithms
I created swarm robot simulation software using python’s matplot and pygame. Our group replicated, analyzed, and compared 3 emerging swarm pathfinding algorithms. We published our results in the ICEIS.
View Project.png)
Software Engineering: Hospital Administration Application
I worked with a group of 10 using agile methodology in order to create a hospital administration software. The software includes service requests, pathfinding, and more.
View Project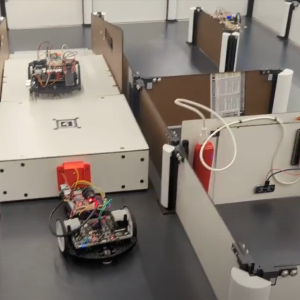
Unified Robotics II: Robot Swarm Solves Maze
I programmed and wired Romi Robots to navigate a maze with wall following, IR receivers, IMUs, a camera, and second order encoder approximations. The robots use information from a QR code in order to emit a signal to unlock a final gate.
View Project.png)
Unified Robotics I: Fourbar Mechanism
In order to move metal plates around different structures, my group and I created 2 romi four bar mechanisms to reach specific heights and angles.
View Project.jpg)
Grip Assist Glove
With the guidance of a WPI research professor, I led a small team to create a prototype robotic grip assist glove to help people with paralyzed hands. The hand can be controlled by voice from a wireless mobile app using BluetoothLE technology.
View Project.png)
Interactive Qualifying Project: Water Biofiltration
I traveled to Panama to complete a research project on water biofiltration. I worked with a sponsor from Batipa Field Station of OTEIMA University to research and develop a biofiltration system that can sustainably increase the reuse of greywater.
View Project.png)
Musical Robotics: Guitarduino
My team and I created a device to play a guitar using solenoids and linear actuators. The robot was capable of playing a pentatonic scale.
View Project.png)
Steam Workshop: Video Game Mod
I independently programmed and animated a character as an add-on for a video game using Aseprite and GML. The mod is currently available on Steam workshop and has over 2000 downloads.
View ProjectExperience
Control Systems Engineer
DEKA
As a Control Systems Engineer at DEKA, I am working under the perception team.
Robotics Engineering Intern
Neurala
At Tyson Build Plates, I programmed ABB GoFa CRB robot arms using RAPID to execute GCodes, respond to controller inputs, and communicate with my custom Node-RED dashboard via TCP.
Software Engineering Intern
Neurala
I developed and automated Python test suite for an Object Detection Pipeline. The tests ensure compatibility between a variety of frameworks, architectures, etc. As I created tests, I also identified, documented, and solved a variety of bugs detected. I utilized Jenkins and Docker to automate the test suite to regularly run on the codebase.
Prototyping Lab Assistant
Worcester Polytechnic Institute Makerspace
I oversaw 30+ 3D printers and lasercutters in WPI's student prototyping lab. I troubleshooted technical issues, managed the printer queue, and assisted other students using the lab.
Math Tutor
Mathnasium
I tutored students in a wide range of math subjects, from addition all the way to algebra. I tutored 2-3 students at a time, and wrote reports about their sessions for parents.
Education
Worcester Polytechnic Institute
Jan 2023 - May 2026MS in Robotics Engineering
GPA: 4.0
Worcester Polytechnic Institute
August 2021 - May 2025BS in Robotics Engineering
GPA: 3.97
- Prototpying Lab Assistant
- Rho Beta Epsilon Honor's Society
- Club Ultimate Frisbee
- Phi Kappa Theta Fraternity
- Chess Club
Belmont High School
Sep 2017 - May 2021High School Diploma
GPA: 3.9
- Robotics Club Captain- FRC Team 6731
- Entrepreneurship Club
- Ultimate Frisbee Team
Skills
Programming Languages
- C++
- Java
- Matlab
- Python
- C
- MathCAD
Software
- Solidworks
- Linux
- Inkscape
- Jenkins
- Docker
Other
- 3D Printing
- Github
- ROS
- Lasercutting
- Agile Software Development
- Team Organization/Project Management
- Microsoft Word and Excel