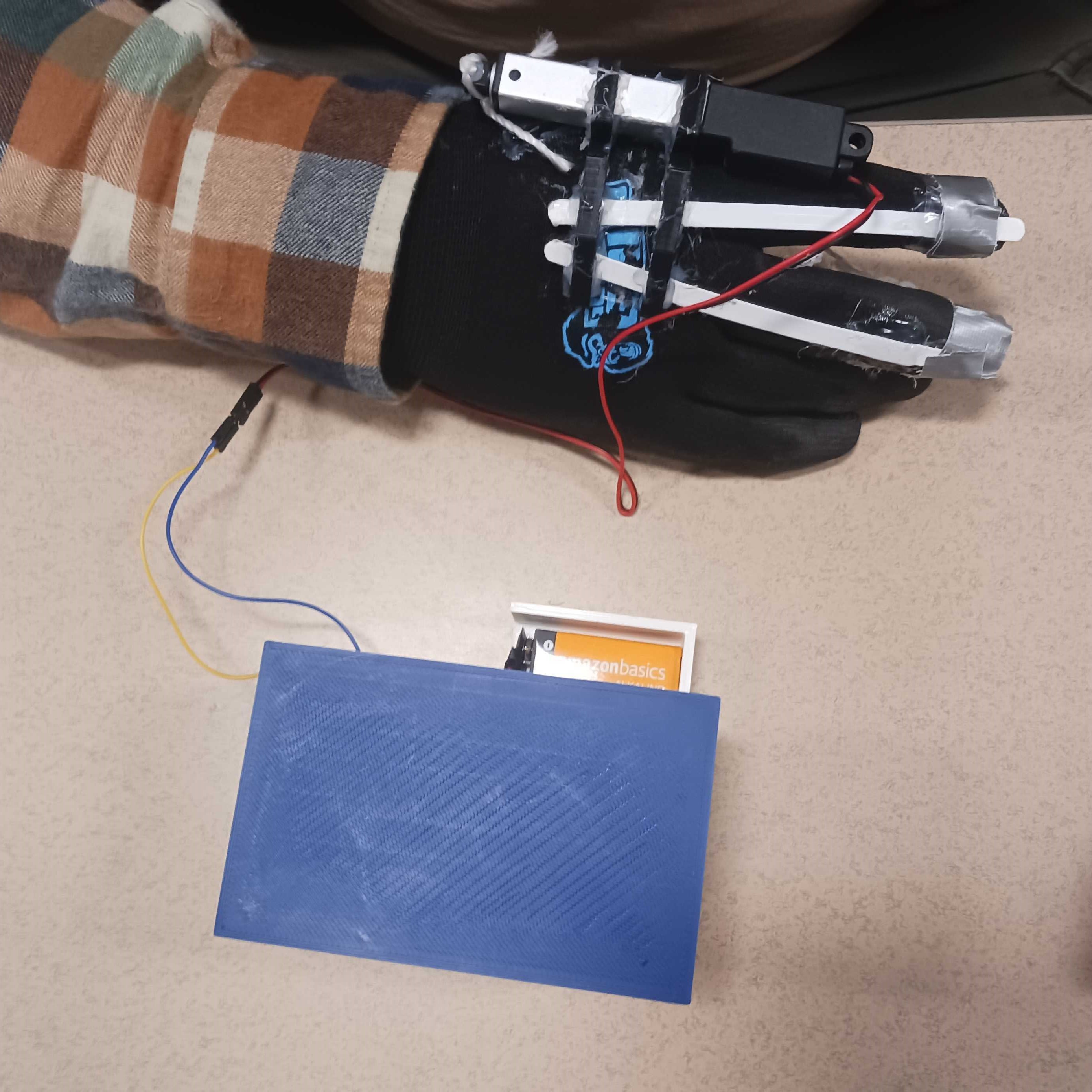
Mechanics
The glove uses a linear actuator in order to contract and release fingers. The motor is tied with a string to the ends of fingers, and when it extends the fingers are forced to grip, and when it releases flat springs return the hand to an open grip. To ensure the motor has enough power to grip small objects, I conducted research into similar projects. I 3D modelled mounts that are 3D printed and attached onto the glove in order to secure the motors.
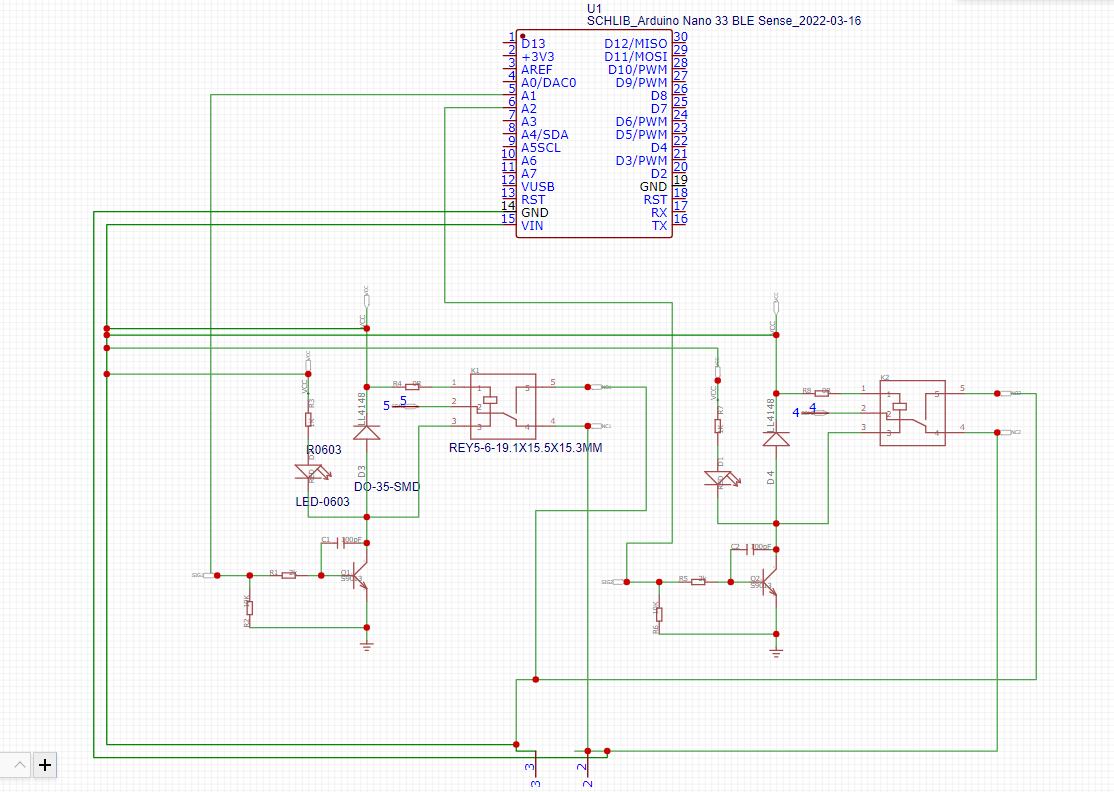
Wiring
The glove utilizes an Arduino Nano BLE in order to connect to a mobile app, and control the motor. Based on available datasheets, an Arduino Nano is not capable of providing sufficient power for our linear actuator. To overcome this, signals are sent to a 2-channel relay, which is connected to a power supply and the motor.
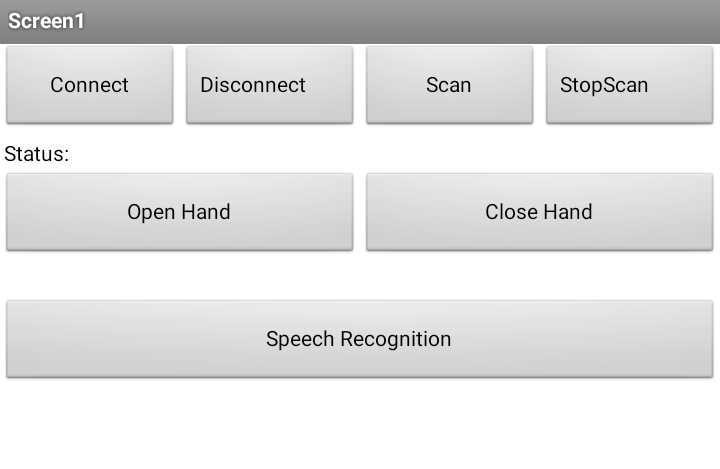
Mobile App
We created a mobile app in order to open and close the glove using voice control. It takes an input, and writes it to the Arduino Nano via a BLE connection. I programmed the arduino nano to advertise itself as a peripheral with a control characteristic. The mobile phone acts as a central device, and writes to the available characteristic using it's service and characteristic UUID.